It refers to the relationship between the static torque T of the stepping motor and the rotor misalignment angle θ in the case of a single pulse and constant current T=f.
The moment angle characteristic is the basic characteristic of the stepping motor. It is very important to measure this characteristic correctly and conveniently, but it still feels difficult to date. People have long wanted to measure the moment angle characteristic of the stepping motor by rotating the induced voltage. However, the relationship between the rotating voltage and the static torque in the stepping motor is complicated.
Moment angle characteristic testGiven an electrical pulse signal, the stepper motor rotor is rotated through the corresponding angle, which is called the step angle of the stepper motor. At present, the step angle of commonly used stepping motors is mostly 1.8 degrees (commonly known as one step) or 0.9 degrees (commonly known as half step). For a progressive motor with a step angle of 0.9 degrees, when we give the stepper motor an electrical pulse signal, the stepper motor turns over 0.9 degrees; for two pulse signals, the stepper motor turns over 1.8 degrees. By analogy, the stepping motor can be continuously operated given the pulse signal continuously. Due to the linear relationship between the electric pulse signal and the rotation angle of the stepping motor, the stepping motor has been widely used in speed control and position control.
Reasonable range of stepper motor heating:The extent to which the motor is allowed to heat up depends mainly on the internal insulation rating of the motor. Internal insulation properties are destroyed at high temperatures (above 130 degrees). Therefore, as long as the internal does not exceed 130 degrees, the motor will not damage the ring, and the surface temperature will be below 90 degrees. Therefore, the stepper motor surface temperature is normal at 70-80 degrees. The simple temperature measurement method is useful for point thermometers. It can also be roughly judged: it can be touched by hand for more than 1-2 seconds, not more than 60 degrees; it can only be touched by hand, about 70-80 degrees; a few drops of water quickly It is 90 degrees or more.
The main advantages of stepping motor driver subdivision are:The low frequency oscillation of the motor is completely eliminated. Low frequency oscillation is an inherent characteristic of stepper motors (especially reactive motors), and subdivision is the only way to eliminate it. If your stepper motor sometimes needs to work in the resonance zone (such as arcing), select the subdivision driver. Is the only choice. ? The output torque of the motor is increased. Especially for three-phase reactive motors, the torque is increased by about 30-40% compared to the case without subdivision. ? Improve the resolution of the motor. Since the step angle is reduced and the uniformity of the step is improved, it is self-evident that 'increasing the resolution of the motor'.
1) Step angle α
The motor rotor is rotated through the theoretical value of the angle for each pulse signal.
Where m is the number of stator phases; z is the number of teeth of the rotor; k is the energization coefficient, m-phase m-beat, k=1; m-phase 2m beat, k=2.
α is generally small, such as: 3 ° / 1.5 °, 1.5 ° / 0.75 °, 0.72 ° / 0.36 °, etc.
2) Moment angle characteristics, maximum static torque Mjmax and starting torque Mq
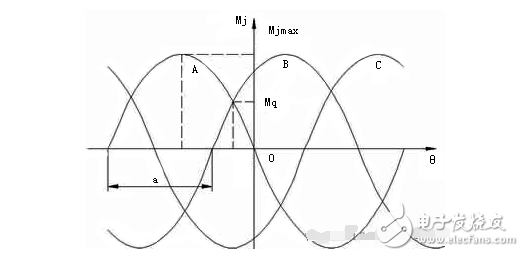
Static: The stepper motor is energized and the rotor is in a stationary state.
Static torque Mj: A load torque M is applied to the motor shaft, and the rotor is rotated by an angle θ (offset angle) in the load direction, and the rotor is thus balanced by an electromagnetic torque Mj and load.
Moment angle characteristic: The curve of the static torque Mj of the single-phase energization of the stepping motor with the offset angle θ.
3) Starting frequency fq and inertial frequency characteristics at startup
Start frequency or kick frequency fq: When no load occurs, the stepper motor starts suddenly and stops at a standstill and enters the highest frequency allowed by the normal operating state without losing steps. Above the start frequency, it will not start properly.
The inertia frequency characteristic at startup: refers to the relationship between the starting frequency and the moment of inertia of the load when the motor drives the pure inertia load.
The stepper motor has a lower starting frequency than a no load with a load (especially an inertial load).
4) Operating torque frequency characteristics
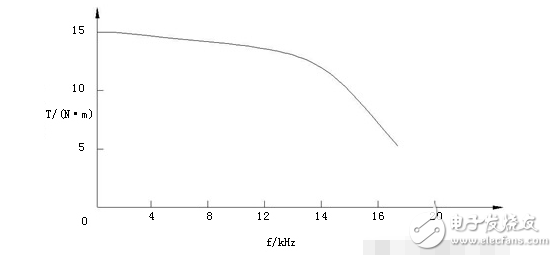
Continuous running frequency: After the stepping motor starts, its running speed can track the highest working frequency of the command pulse frequency rising continuously without losing step. Its value is much larger than the starting frequency.
Running torque frequency characteristics: It describes the relationship between output torque and continuous running frequency when the stepper motor is running continuously.
Proximity Switch For Automobile,Proximity Switch For Industrial Control,Sensing Probe For Industry And Horticulture,Temperature Sensing Probe
Foshan City Jiulong Machine Co., Ltd , https://www.jlthermostat.com